
2016
Fabrication of Micro-Needle Electrodes for Bio-Signal Recording by a Magnetization-Induced Self-Assembly Method
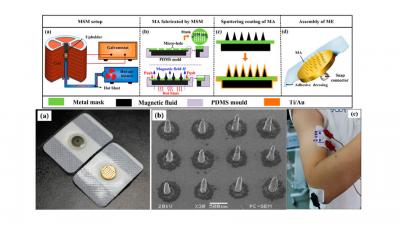
Keyun Chen#, Lei Ren#, Zhipeng Chen, Chengfeng Pan, Wei Zhou and Lelun Jiang* Sensors 2016, 16(9), 1533 原文链接:https://doi.org/10.3390/s16091533 Abstract Micro-needle electrodes (MEs) have attracted more and more attention for monitoring physiological electrical signals, including electrode-skin interface impedance (EII), electromyography (EMG) and electrocardiography (ECG) recording. A magnetization-induced self-assembling method (MSM) was developed to fabricate a microneedle array (MA). A MA coated with Ti/Au film was assembled as a ME. The fracture and insertion properties of ME were tested by experiments. The bio-signal recording performance of the ME was measured and compared with a typical commercial wet electrode (Ag/AgCl electrode). The results show that the MA self-assembled from the magnetic droplet array under the sum of gravitational surface tension and magnetic potential energies. The ME had good toughness and could easily pierce rabbit skin without being broken or buckling. When the compression force applied on the ME was larger than 2 N, ME could stably record EII, which was a lower value than that measured by Ag/AgCl electrodes. EMG signals collected by ME varied along with the contraction of biceps brachii muscle. ME could record static ECG signals with a larger amplitude and dynamic ECG signals with more distinguishable features in comparison with a Ag/AgCl electrode, therefore, ME is an alternative electrode for bio-signal monitoring in some specific situations. Keywords: micro-needle array; electrode; magnetization-induced self-assembling; insertion; impedance; EMG; ECG
Fabrication of a Micro-Needle Array Electrode by Thermal Drawing for Bio-Signals Monitoring
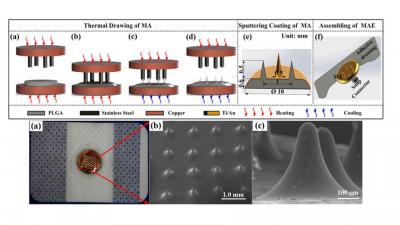
Lei Ren, Qing Jiang, Keyun Chen, Zhipeng Chen, Chengfeng Pan and Lelun Jiang* Sensors 2016, 16(6), 908 原文链接:https://doi.org/10.3390/s16060908 Abstract A novel micro-needle array electrode (MAE) fabricated by thermal drawing and coated with Ti/Au film was proposed for bio-signals monitoring. A simple and effective setup was employed to form glassy-state poly (lactic-co-glycolic acid) (PLGA) into a micro-needle array (MA) by the thermal drawing method. The MA was composed of 6 × 6 micro-needles with an average height of about 500 μm. Electrode-skin interface impedance (EII) was recorded as the insertion force was applied on the MAE. The insertion process of the MAE was also simulated by the finite element method. Results showed that MAE could insert into skin with a relatively low compression force and maintain stable contact impedance between the MAE and skin. Bio-signals, including electromyography (EMG), electrocardiography (ECG), and electroencephalograph (EEG) were also collected. Test results showed that the MAE could record EMG, ECG, and EEG signals with good fidelity in shape and amplitude in comparison with the commercial Ag/AgCl electrodes, which proves that MAE is an alternative electrode for bio-signals monitoring. Keywords: micro-needle array; electrode; impedance; EMG; ECG; EEG; finite element method

Nanostructured Surface with Tunable Contact Angle Hysteresis for Constructing In Vitro Tumor Model
Kang Sun, Mingliang Yang, Yue Xu, Lelun Jiang, Rong Song, Yang Liu, Qing Jiang, and Chao Zhang* Journal of Nanomaterials Volume 2016, Article ID 8275915, 5 pages 原文链接:http://dx.doi.org/10.1155/2016/8275915 Abstract Contact angle hysteresis (CAH) is an important phenomenon in surface chemistry. In this paper, we fabricated nanostructured substrates and investigated the relationship between roughness and CAH. We demonstrated that by patterning well-tuned CAH in superhydrophobic background, we can pattern droplets with controlled sizes. We further showed that our system could be used in fabricating complex hydrogel architecture, allowing coculture of different types of cells in three-dimensional way. This CAH-based patterning strategy would provide in vitro models for tissue engineering and drug delivery.
Effect of Magnetic Field on Stability of Jet Motion in Electrospinning
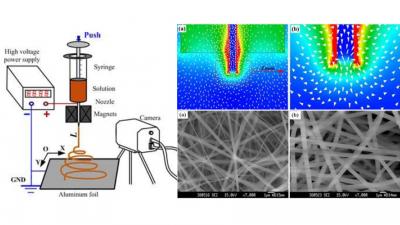
Weilong Huang, Lelun Jiang*, Jie Luo, Zhipeng Chen, Lei Ren & Chungyuen Li Materials and Manufacturing Processes Volume 31, 2016 - Issue 12 Pages 1603-1607 原文链接:https://doi.org/10.1080/10426914.2015.1103858 Abstract Electrospinning uses an electrical charge to draw fine polymer fibers from a liquid. Stable jet stage and whipping instability stage exist in the electrospinning process. It is difficult to control stability of jet motion. Electrospinning with NbFeB permanent magnets is proposed to enhance the stability of jet motion in this paper. This method is very simple and effective. The electrospinning process assisted by magnets was observed by a high-speed camera, and the magnetic field was numerically analyzed by finite element method. The experimental results showed that the stability of jet motion increased obviously. We have explained that the magnets restricted and focused the motion of charges as a magnetic lens and created a uniform electric field distribution as an auxiliary electrode at the end of spinneret. The stable jet length, whipping instability cone angle, and fiber diameter were measured by experiments. The stable jet length increased significantly, the whipping instability cone angle decreased, and the average diameter of fibers increased slightly and distributed more evenly as the magnets were fixed at the end of spinneret. Keywords: Angle, Diameter, Electrospinning, Jet, Magnet, Nanofiber, Stability, Whipping
Aluminum nanopyramid array with tunable ultraviolet–visible–infrared wavelength plasmon resonances for rapid detection of carbohydrate antigen 199
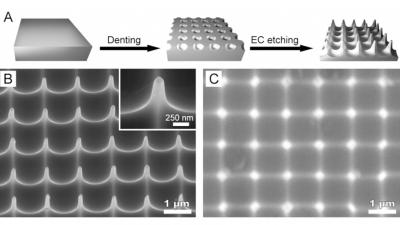
Wanbo Li, Yongcai Qiu, Li Zhang, Lelun Jiang, Zhangkai Zhou, Huanjun Chen, Jianhua Zhou* Biosensors and Bioelectronics Volume 79, 15 May 2016, Pages 500-507 原文链接:https://doi.org/10.1016/j.bios.2015.12.038 Abstract Aluminum-based localized surface plasmon resonance (LSPR) holds attractive properties include low cost, high natural abundance, and ease of processing by a wide variety of methods including complementary metal oxide semiconductor process, making itself having an edge over conventional ones induced by noble metal. However, the inherent drawbacks of plasmonic mode limited on UV–green wavelength, low refractive index sensitivity, as well as heavy-shape-dependence greatly prevent aluminum plasmonics from real-life biosensing. Here, we demonstrated a uniform quasi-3-dimensional Al nanopyramid array (NPA) structure with tunable ultraviolet–visible–infrared (UV–vis–NIR) plasmon resonances for biosensing. By changing the reflection measuring angle, we could easily obtain typical peaks simultaneously exhibited on the reflectance spectrum across UV–vis–NIR wave region. The Al NPAs carried out high refractive index sensitivities which even comparable with that of noble metal, and can be used as a biosensor for directly detecting cytochrome c and carbohydrate antigen 199 in air after the sensing surface was washed cleanly and dried; the limits of detection were determined to be 800 nM and 29 ng/mL, respectively. Our proposed work therefore initiates the low-cost, high-performance biosensing using aluminum plasmonics, which would find wide applications in rapid diagnosis, mobile-healthcare and environmental monitoring. Keywords: Localized surface plasmon resonance; Aluminum nanopyramid array; Ultraviolet–visible–infrared; Biosensing; Cancer biomarker
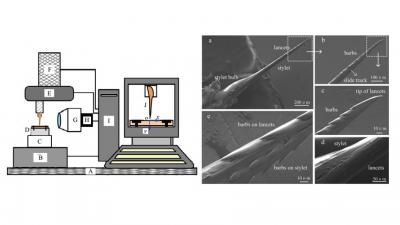
Insertion and Pull Behavior of Worker Honeybee Stinger
Jintian Ling, Lelun Jiang*, Keyun Chen, Chengfeng Pan, Yan Li, Wei Yuan, Liang Liang Journal of Bionic Engineering Volume 13, Issue 2, April 2016, Pages 303-311 原文链接:https://doi.org/10.1016/S1672-6529(16)60303-7 Abstract Worker honeybee pierces animal or human skin with its ultra-sharp stinger and injects venom to defend itself. The insertion behavior is a painless transdermal drug delivery process. In this study, Apis cerana cerana worker honeybee was chosen as the research object. The geometry and structure of the stinger were observed by the Scanning Electron Microscope (SEM). High-speed video imaging technique was adopted to observe the stinger insertion and pull behavior of honeybee. The skin insertion, pull-out, in-plane buckling and out-of-plane bending forces of honeybee stinger were tested by a self-developed mechanical loading equipment. Results showed that the honeybee stinger pierces directly into skin without frequent vibration. The pull-out force (average 136.04 mN) was two orders of magnitude higher than the penetration force (average 1.34mN). Compared with the penetration force, the in-plane buckling force (average 6.72 mN) was in the same order of magnitude. The result of out-of-plane bending test showed that the stinger was elastic and it could recover after bending. The excellent geometry and structure of honeybee stinger will provide an inspiration for the further improved design of microneedle-based transdermal drug delivery system. Keywords: stinger; mechanical loading; penetration force; pull-out force; barbs
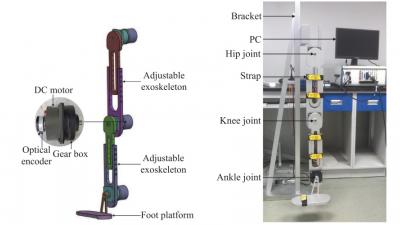
The design and control of a 3DOF lower limb rehabilitation robot
Junpeng Wu, Jinwu Gao*, Rong Song, Rihui Li, Yaning Li, Lelun Jiang Mechatronics Volume 33, February 2016, Pages 13-22 原文链接:https://doi.org/10.1016/j.mechatronics.2015.11.010 Abstract Aiming to assist stroke patients who suffer from motor dysfunction after stroke and reduce the stress of physiotherapists, a 3-degree-of-freedom (3DOF) lower limb rehabilitation robot (LLRR) has been developed for the motion recovery in this paper. At first, a simple and flexible structure of LLRR is designed, which involves hip, knee and ankle joints and can also be adjusted to fit for the different heights of patients. Then, for the controller design, control-oriented model of LLRR is studied and validated by both simulation and experiments, including the kinematic model of mechanical system, friction model of rotation joints and motor model of actuators. Based on the proposed models, an adaptive robust sub-controller is synthesized to make each joint track its designed training trajectory, overcome system uncertainties and reject the disturbances from patient. At last, experiments are carried out to validate the proposed LLRR by the passive movement training. Keywords: Motor dysfunction; Lower limb rehabilitation robot; Motion recovery; Adaptive robust sub-controller; Passive movement training
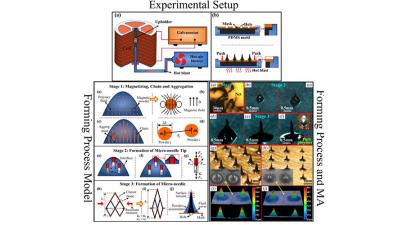
Magnetization-induced self-assembly method: Micro-needle array fabrication
Chengfeng Pan, Keyun Chen, Lelun Jiang*, Zhipeng Chen, Lei Ren, Liang Liang, Wei Yuan Journal of Materials Processing Technology Volume 227, January 2016, Pages 251-258 原文链接:https://doi.org/10.1016/j.jmatprotec.2015.08.025 Abstract Magnetization-induced self-assembly method (MSM) was proposed to fabricate micro-needle array (MA). Curable magnetic fluid droplet array was extruded from the holes of perforated mask and meanwhile drawn to form the MA shape by magnetic force. MA was heated and cross linking solidified. The formation mechanism of magnetization-induced self-assembly micro-needle was analyzed and its process was divided into three stages: powders magnetizing, chain and aggregation, formation of micro-needle tip, and formation of micro-needle. The formation process was observed by high-speed camera. It was found that the formation process was consistent with the theoretical analysis. The effects of mask-hole diameter, powder-to-volume ratio and magnetic field intensity on MA fabrication were investigated by experiments. The results showed that the sharpness of micro-needle decreased with the decrement of mask-hole diameter and the increment of magnetic field intensity. The height of micro-needle increased with magnetic field intensity and powder-to-volume ratio. We anticipate that MSM will be suitable to fabricate MA-substrate for biomedical engineering fields such as biosensor, bio-electrode and transdermal drug delivery. Keywords Micro-needle array; Magnetization-induced; Self-assembly; Magnetic fluid; Solidify
