

【Npj Flexible Electronics】具有同步运动和传感能力的磁性软微机器人
软体微型机器人在人机交互和安全检查方面引起了极大的关注,并展现出巨大的潜力。运动和感知是实现机器人有效步态和实际应用的两个关键特性。受自然启发,本研究报道了一种磁性软体微型机器人,它同时集成了运动和传感能力。通过喷射打印和磁化感应方法的协同作用,以高速和高精度在微型机器人内部直接构建了具有丰富且规则表面形态的微锥形矩阵,作为多足和摩擦电增强传感结构。该机器人能够识别其在各种应用场景中的当前身体状态,并通过机器学习策略识别地形。我们的工作为智能微型机器人在非磁性结构环境中执行任务提供了一种可定制的方法,并为下一代软体机器人提供了嵌入式传感能力。
解析探讨:
该研究旨在解决软体机器人在实际应用中运动与感知能力难以集成的重要挑战。受尺蠖等自然界生物启发,研究初衷是开发一种能同时实现自主运动和环境感知的磁性软体millirobot,以提升其在非结构化环境(如管道检测、安全巡查)中的适应性和智能化水平。传统磁性机器人多聚焦于运动控制,但缺乏嵌入式传感能力,限制了其在封闭或未知场景下的自主性。
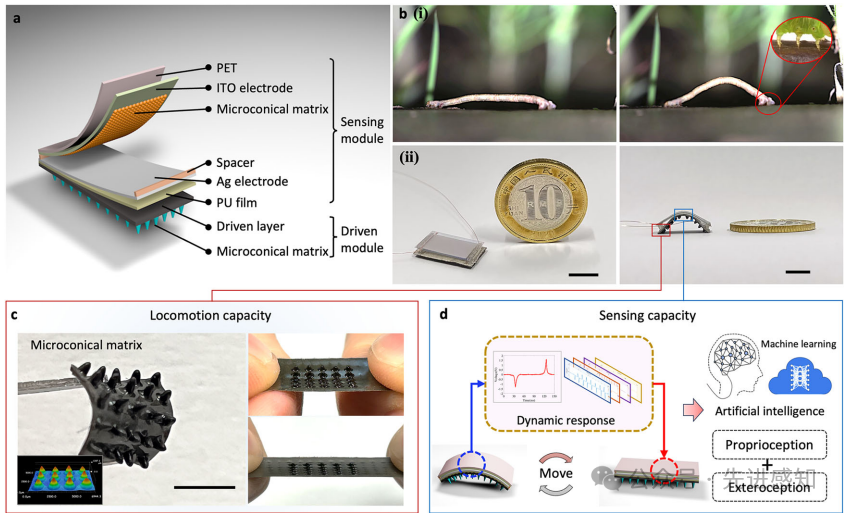
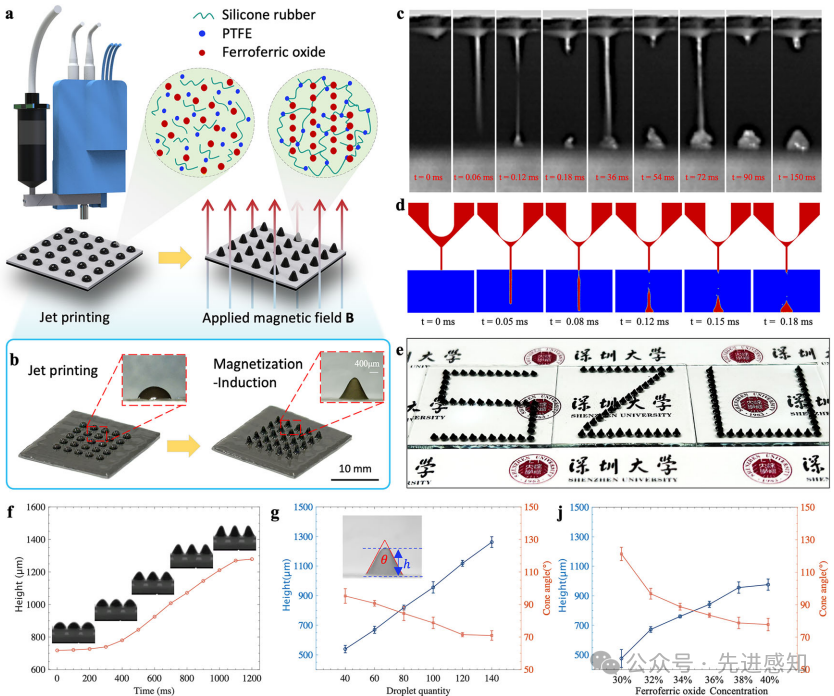
技术路线的核心在于创新性地采用合作喷射打印与磁化诱导(CJM)方法,高速高精度地构建三维微锥矩阵作为多功能结构:既作为多足运动单元增强摩擦与负载能力,又作为摩擦电传感单元实现自供能信号生成。millirobot采用多层设计:底部驱动模块包含磁化驱动层和微锥足阵列,上部传感模块则通过介电层与电极耦合,在磁场触发下产生电信号。
制造过程中,CJM方法通过控制墨水特性、液滴间距等参数,实现微锥结构的可定制化成型,其高度可达1280μm且分布均匀。
运动时,机器人在外部磁场(100 mT, 1 Hz)驱动下模拟尺蠖的波浪式爬行,平均速度达1.4 mm/s,并可负重5.2倍自重(1.55 g)通过狭窄空间(高3 mm)。
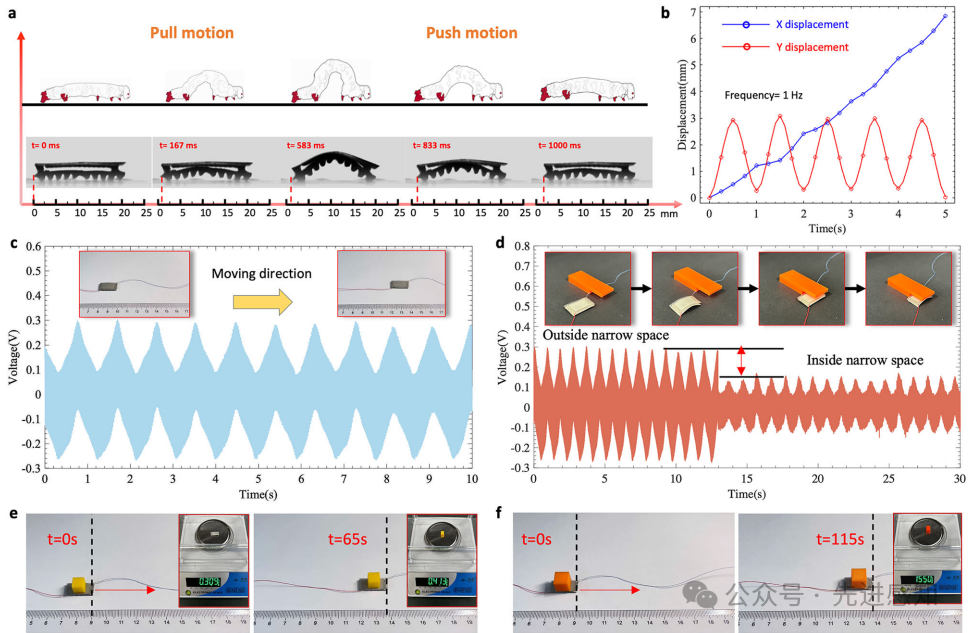
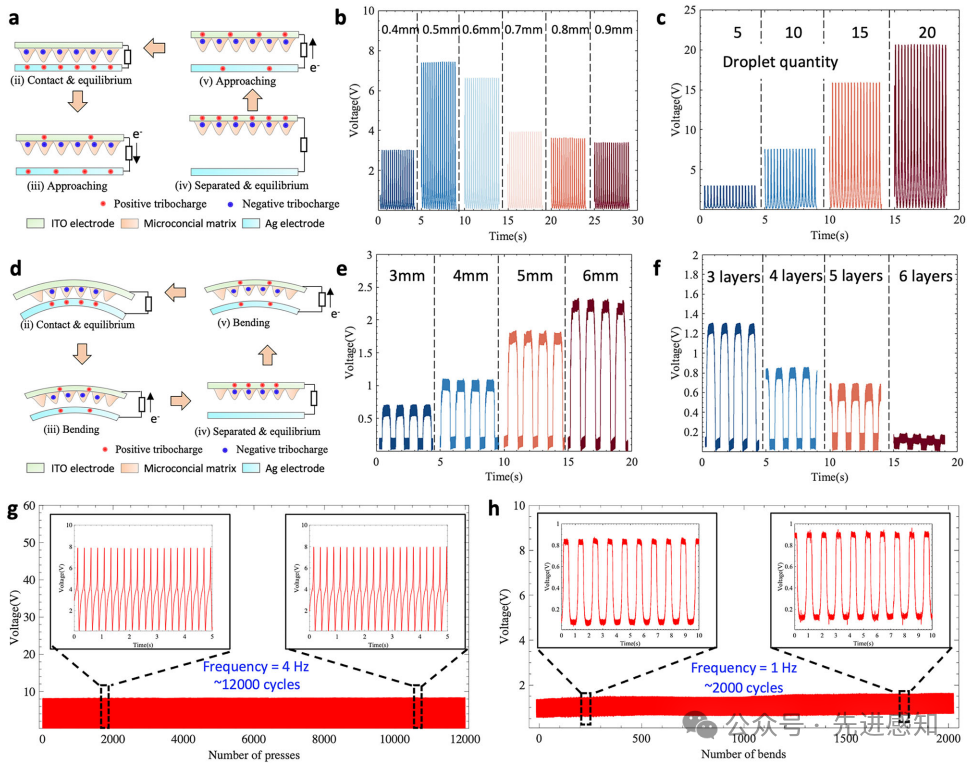
研究的亮点在于其“运动-感知一体化”设计。传感模块在接触分离模式下输出电压可达25 V,弯曲模式下为2.4 V,且经过12,000次循环测试仍保持稳定,实现了本体状态(如形变、负载)的实时监测。
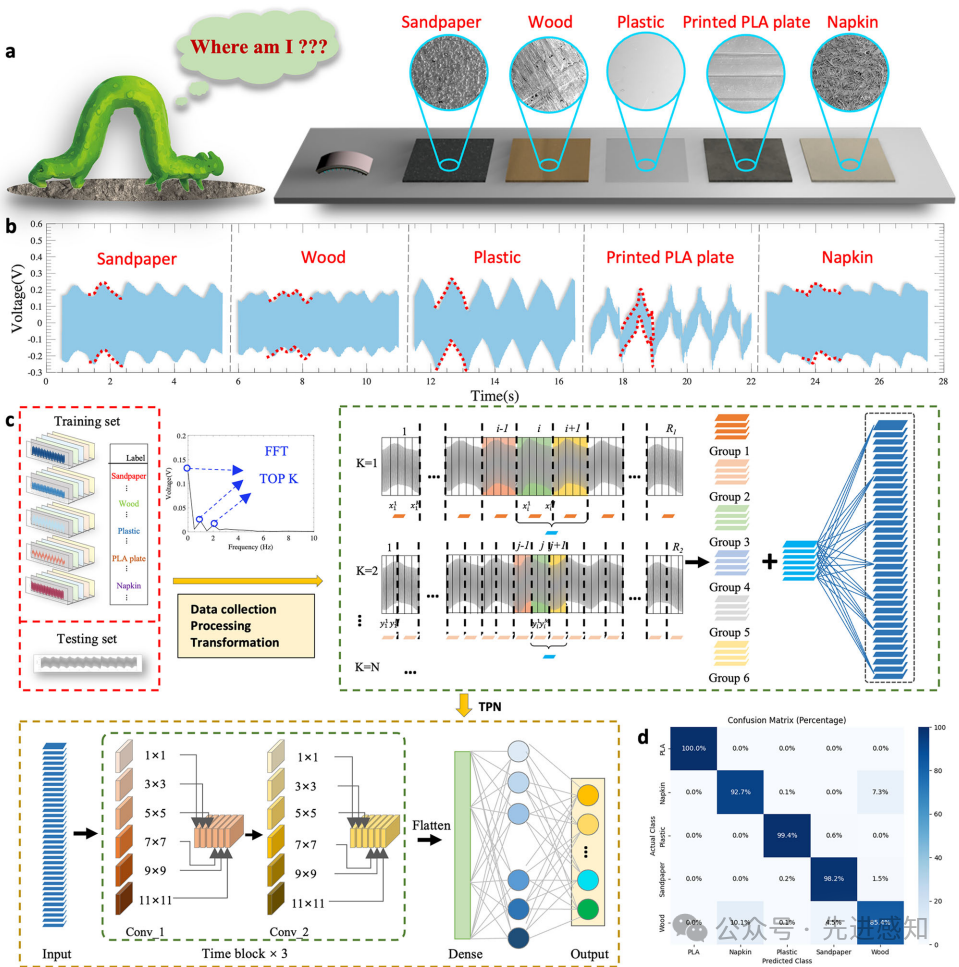
更突出的是,通过机器学习策略(Temporal Perceiver Network),机器人能根据运动信号识别砂纸、木材、塑料等五种地形,准确率高达96.7%,展现了强大的外感知能力。
创新点集中体现为三大突破:一是微锥矩阵的结构-功能融合设计,将运动足与传感单元集成于单一制造流程;二是CJM技术实现高精度、可扩展的柔性电子制造,克服了传统方法中传感元件嵌入的难题;三是通过机器学习将物理信号转化为环境认知,赋予软机器人“触觉智能”。
该研究的价值在于为下一代软机器人提供了“感知即运动”的范式,其小型化、自供能特性在工业管道内部检测、灾害救援等封闭场景中潜力巨大。前景上,未来通过优化无线通信与动态磁场控制,可进一步拓展至三维环境导航与多机器人协同作业,为智能软体机器人在物联网和工业4.0中的应用奠定基础。
欢迎大家在评论区发表自己的看法,期待您的关注和探讨!
原文链接:https://www.nature.com/articles/s41528-025-00437-0?fromPaywallRec=false
转自:https://mp.weixin.qq.com/s/8Epnl0KK9CWWSs1oNLvAFg
