
【纳米人】这个机器人有点神:柔软小身板,边跑边发电!
陆生腹足软体动物的长相可能并不讨喜,很多人往往看到都是敬而远之。然而,看似软弱无力又长相各异的陆生腹足动物却有着一项神奇的能力:它们几乎能在所有的陆地表面攀爬。这只在夜雨后的玻璃大门上如履平地的蜗牛恰好就引得论文作者驻足,它居然能在在如此光滑的玻璃上如履平地!透过玻璃观察蜗牛的腹足,赫然发现了奇特的波浪状图案,一起一伏推挽向前。

此后又在同为腹足软体动物的黑蛞蝓上也发现了相同的波浪状结构图案,经过详尽的文献调研,发现正是这些“波浪”赋予了它们如此神奇的能力。经过结构设计和功能改进,一只神似蛞蝓,却有着诸多非凡能力的仿生软体微型机器人就出现了。

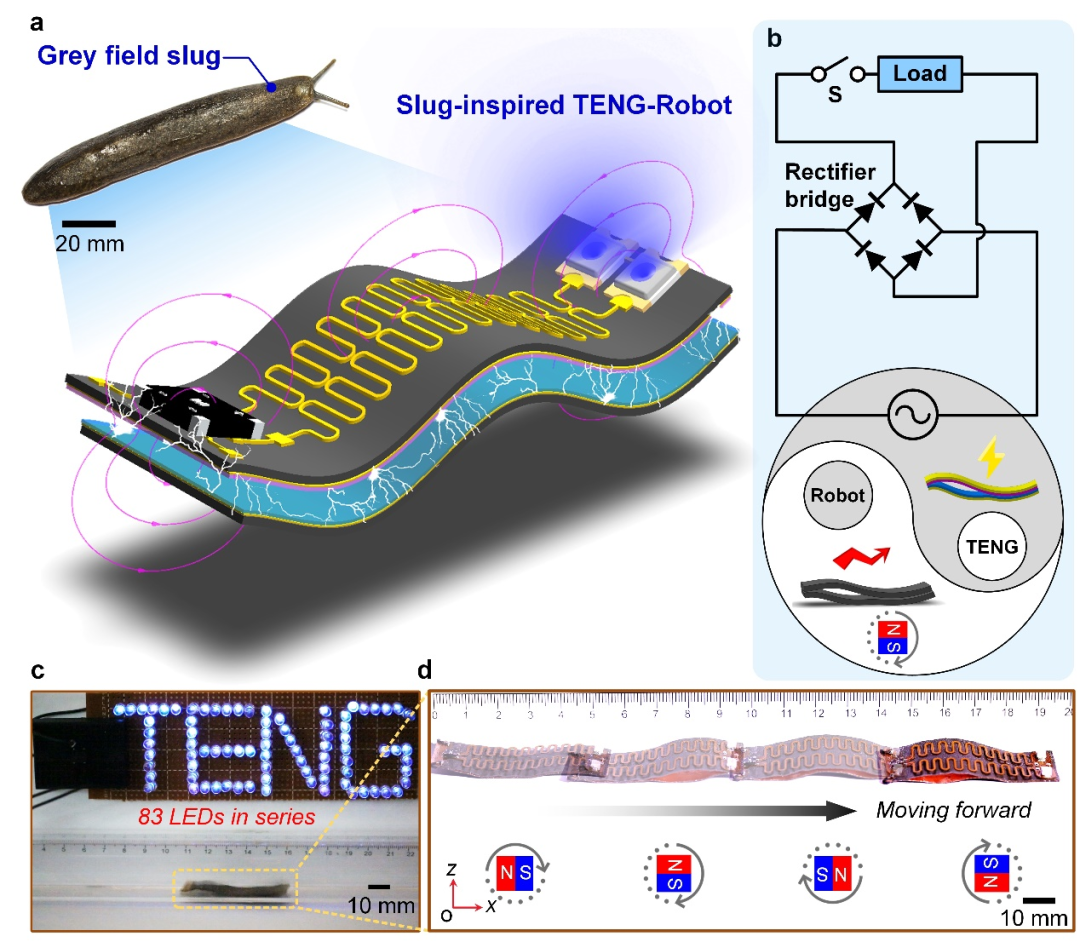
近日,中山大学生物医学工程学院蒋乐伦教授团队开发出的一款名为TENG-Robot的软体机器人,以“Slug-inspired Magnetic Soft Millirobot Fully Integrated with Triboelectric Nanogenerator forOn‐board Sensing and Self‐powered Charging”为题发表于能源类国际顶级期刊Nano Energy(IF:17.881),第一作者为中山大学生物医学工程学院博士生彭乐伦。作者从结构和功能的角度设计了一种受蛞蝓运动模式启发且完全集成了摩擦纳米发电机的磁场驱动仿生软体机器人(TENG-Robot)。在旋转磁场的作用下,可编程磁化后的柔性磁片产生类似蛞蝓腹足的行波状几何结构而稳定运动,同时驱动集成在磁片上的摩擦纳米发电机以接触分离的模式产生摩擦电(电压峰峰值高达160V)。TENG-Robot由磁场无线驱动,可以在各种地形(如平面、斜坡、间隙、弯道、隧道)上以蛞蝓状的步态爬行、攀爬和转向,完全柔软且高度集成,展现出前所未有的适应性、敏捷性和多功能性。在结构仿生的基础上作者还进一步实现了功能仿生,以多种动物的神奇能力作为模板开发出功能化软体机器人。
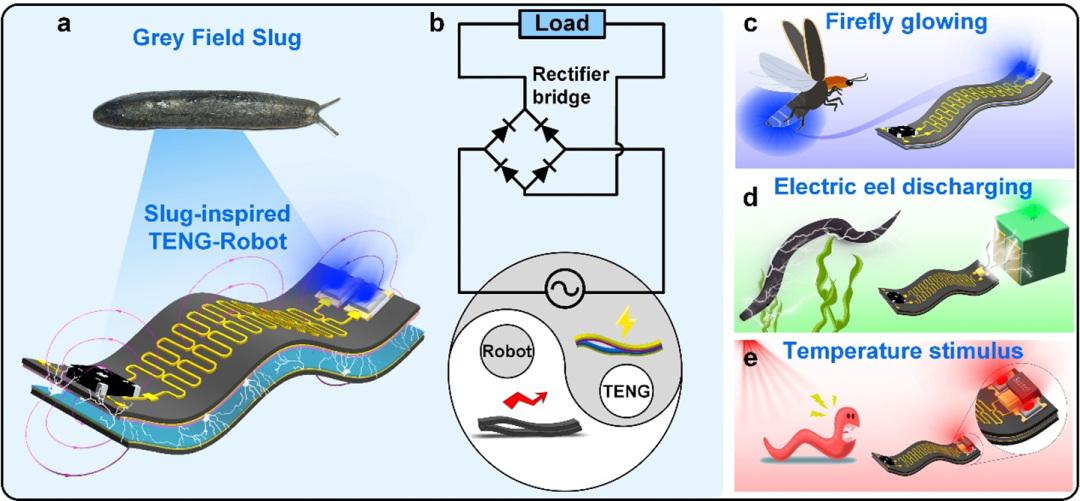
自然生物进化出许多特殊的结构和技能以适应复杂多变的环境,科学家和工程师从中汲取灵感,结合实际工程应用需求开发出更强大的机器,仿生概念应运而生。经典的仿生创造如蝙蝠之于雷达,蜻蜓之于飞机,鱼鳔之于潜艇,无不受惠于仿生学的运用。蛞蝓作为典型的软体动物,几乎可以在所有的陆地表面平稳的运动,这得益于其强大的腹足。蛞蝓的腹足肌肉在运动中,从头到尾不间断的产生周期性踏板波,波状结构提供了足够的前进动力同时还将接触面分布以利于平顺运动,堪称微妙而强大。借鉴蛞蝓的运动机理,设计出波状起伏的运动结构,减少运动接触面摩擦阻力的同时还有利于机器人平顺运动。进一步的,从功能仿生角度出发,作者还进一步开发出可自持续发光,可自供能充电,可自供能传感的多功能化TENG-Robot。
传统机器人普遍采用刚性驱动器,然而刚性机器人自由度受限且在人机交互中具有潜在的危险性。软体机器人因其结构柔软和自由度极高的特性而展现出优异的环境适应和人机交互能力,引起了研究学者的广泛关注。现有的研究大多从材料和驱动两个方向对仿生软体机器人不断推陈出新,已发展出了包括磁、电、光、热、液压、气压、化学等多种有效的驱动方式。其中磁场驱动兼具快速响应和远程控制的优势,在复杂的封闭环境中的应用潜力尤为突出,在软体机器人的驱动方式中脱颖而出。并且磁场可以穿透各种非磁性物质,并且对生物组织无害,在生物医学工程领域具有无可替代的优势。

自供能技术是通过收集周围环境中的能量,并转化为电能来维持系统运行的新兴技术。在自供能技术中,主要的能量采集方式有电磁(EMG),压电(PENG),热电(TEG)和摩擦电(TENG)等。摩擦纳米发电机在低频振动环境下具有显著优势,发电效率很高。为了使仿生软体机器人成为一个更接近动物的具有高度功能化的系统,更有效的功能如自我感知和能量供应等,应该被集成到软体机器人中协同增效。摩擦纳米发电机广泛采用柔性材料制备,易于集成在软体机器人上而避免刚度失配等问题,因此摩擦纳米发电机比较有望实现仿生软体机器人的功能化。

以下是三个不同功能的TENG-Robot的演示视频:



总之,TENG-Robot不仅提出了一种磁场无线驱动的创新仿生蛞蝓结构,而且拓展了仿生软体机器人的多功能应用潜力。TENG-Robot展示了自供能软体机器人的崭新概念,也为理解动物行为背后的原理奠定了重要基础。
被报道在公众号,纳米人https://mp.weixin.qq.com/s/mosEOqKvPc_r_SeXB3kMZw
