

AFM | 纯液态金属相变机器人:单一高频磁场驱动多模态运动
液态金属因兼具高电导率、可变形性和固液相变带来的刚度调控能力,近年来被广泛用于柔性电子、软体机器人和生物医学工程。对于液态金属机器人而言,远程、无线、可控的驱动方式是实现实际运动和功能操作的关键。磁场驱动具有非接触、响应快和穿透能力强等优势,但常见液态金属本身并不具备磁性。因此,已有研究通常需要向液态金属中掺入 Fe、NdFeB 等磁性微纳颗粒,使其获得磁响应能力。然而,颗粒掺杂会引入界面不相容、材料非均一、黏度升高、电导率降低和长期稳定性下降等问题;在电解质环境中,Fe 颗粒还可能与 Ga 基液态金属形成微电偶腐蚀。同时,许多相变型磁控液态金属机器人还依赖磁场驱动与外部温控相结合的双场系统,增加了系统复杂度,也限制了相变调控和运动控制的鲁棒性。
近日,研究人员提出了一种由纯 Field’s metal 合金 BiInSn 构成的液态金属相变机器人,其熔点约为 62 ℃,并仅使用 500 kHz 高频磁场进行驱动。在该体系中,高频磁场在金属内部诱导涡流,涡流一方面产生焦耳热,实现快速、可逆的固液相变;另一方面与磁场相互作用产生洛伦兹力,实现非接触运动驱动。因此,该机器人不需要磁性颗粒掺杂,也不需要额外温控系统。实验显示,该机器人可在固态和液态之间切换,固态弹性模量约为 4.4 GPa,液态储能模量约为 4.7 kPa,刚度变化跨越约六个数量级。在运动形式上,固态机器人可实现垂直推进、斜向推进和水平平移;液态机器人可实现垂直推进、动态悬浮、振荡形变和定向平移。基于这种相变和运动耦合能力,作者进一步展示了其在复杂迷宫和管道中的自适应导航,以及作为无线移动热源用于材料/电路损伤与修复,并作为微流控泵、阀门和反应加速单元参与片上流体操控。
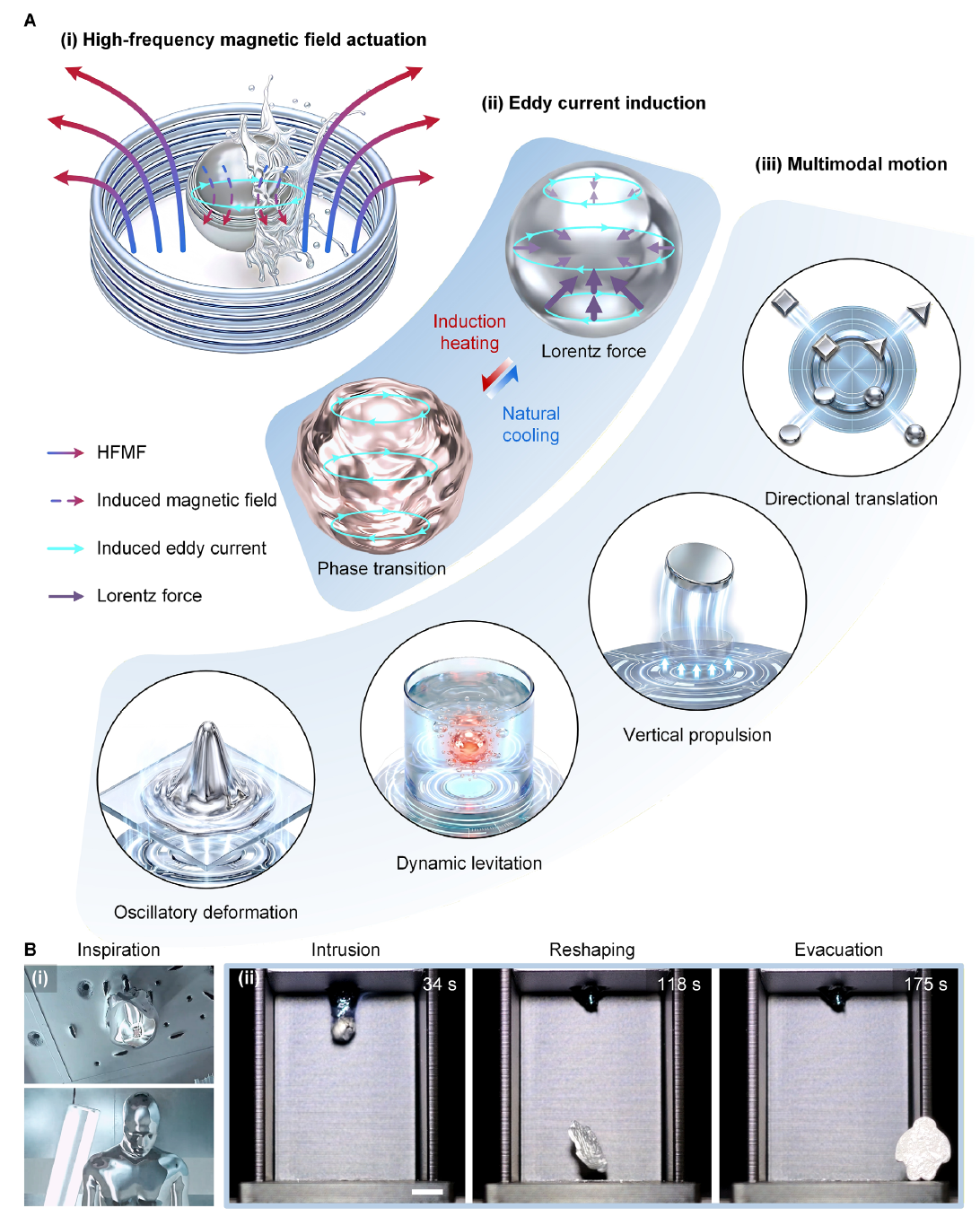
图1:高频磁场驱动下液态金属相变机器人的基本机制与运动模式。高频磁场在 BiInSn 机器人内部诱导涡流,涡流产生的焦耳热用于固液相变,涡流与磁场耦合产生的洛伦兹力用于机械驱动。图中同时展示了定向平移、垂直推进、动态悬浮和振荡形变等典型运动模式,并以受《终结者2》启发的演示说明机器人可通过熔化穿过狭窄空间,再在模具中冷却恢复形状并继续运动。
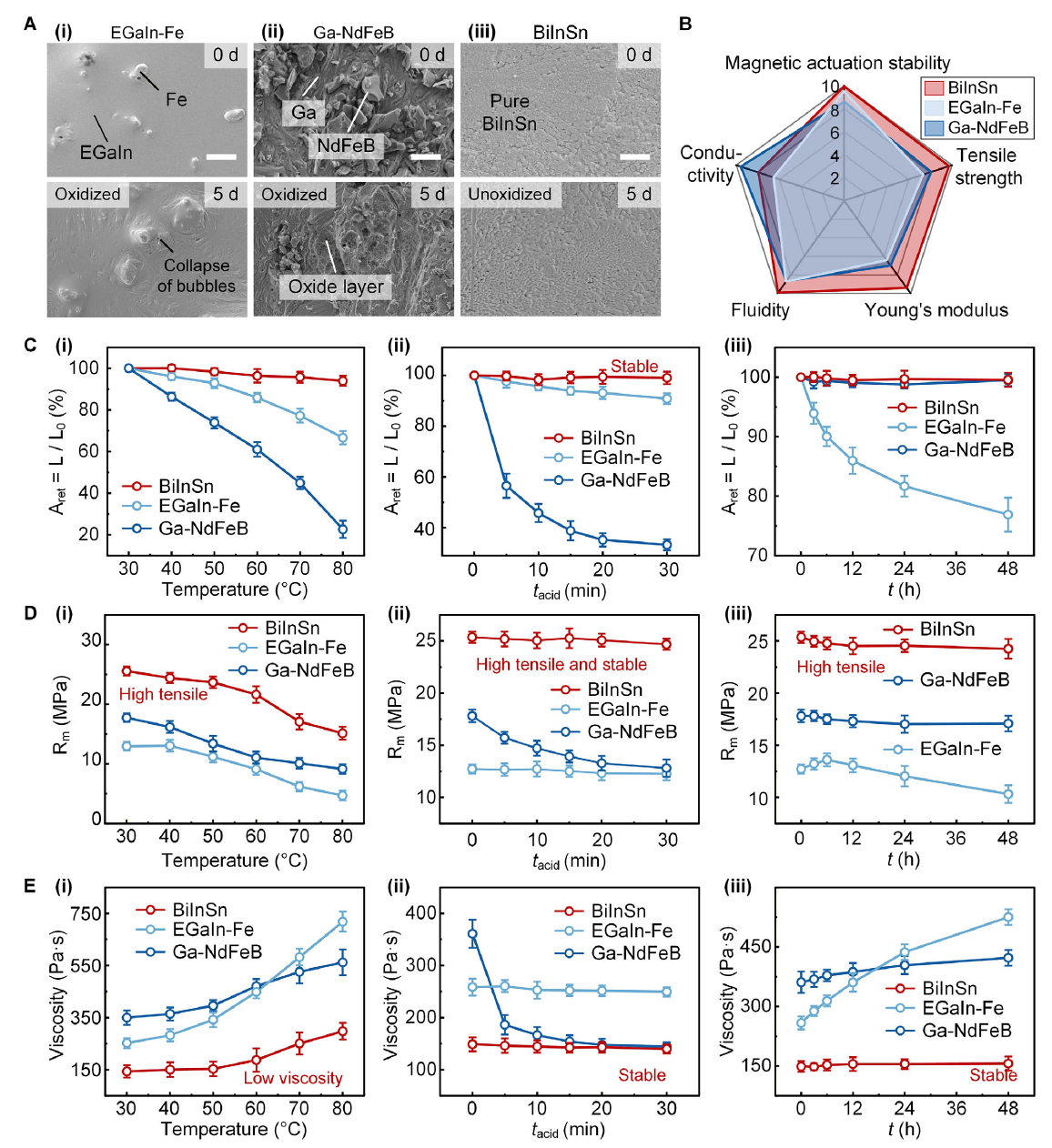
图2:纯 BiInSn 相变机器人与典型磁性颗粒掺杂液态金属机器人的性能比较。EGaIn-Fe 和 Ga-NdFeB 体系中存在颗粒-基体相分离、氧化或腐蚀等问题,而未掺杂的 BiInSn 机器人在空气中静置后仍保持较致密的表面形貌。作者从磁驱动稳定性、拉伸强度、杨氏模量、流动性和电导率等维度进行了比较,结果表明在所测试条件下,纯液态金属相变机器人具有更好的环境稳定性和较均衡的力学/流体性能。
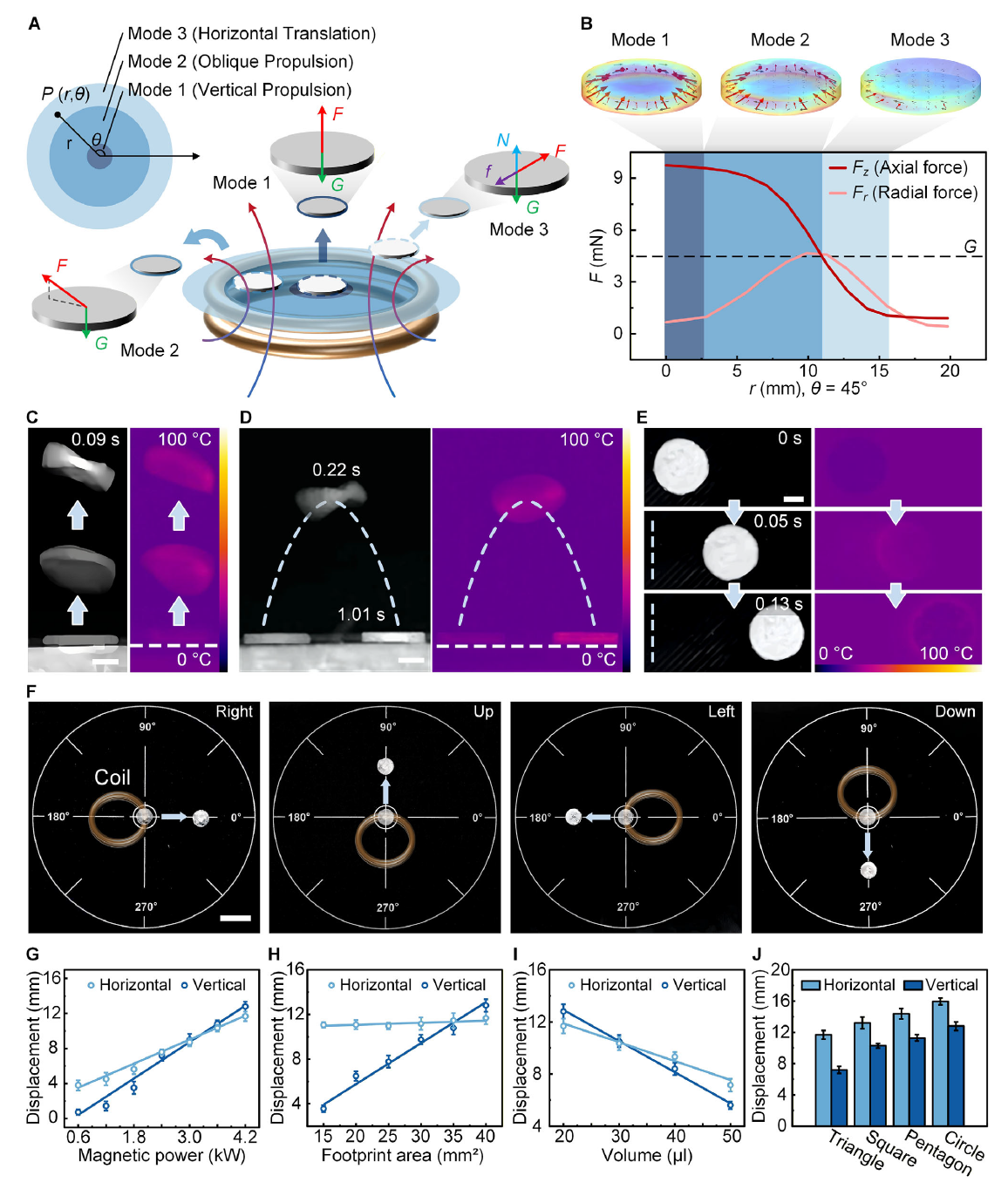
图3:固态液态金属相变机器人的运动机制与调控规律。通过短时高频磁场脉冲,机器人可在避免明显升温和熔化的情况下产生洛伦兹力驱动。机器人相对线圈的位置决定轴向力和径向力的比例,从而形成垂直推进、斜向推进和水平平移三种运动模式。进一步实验表明,磁场功率、机器人底面积、体积和几何形状都会影响运动距离,其中圆形结构在相同体积下表现出较高的运动效率。
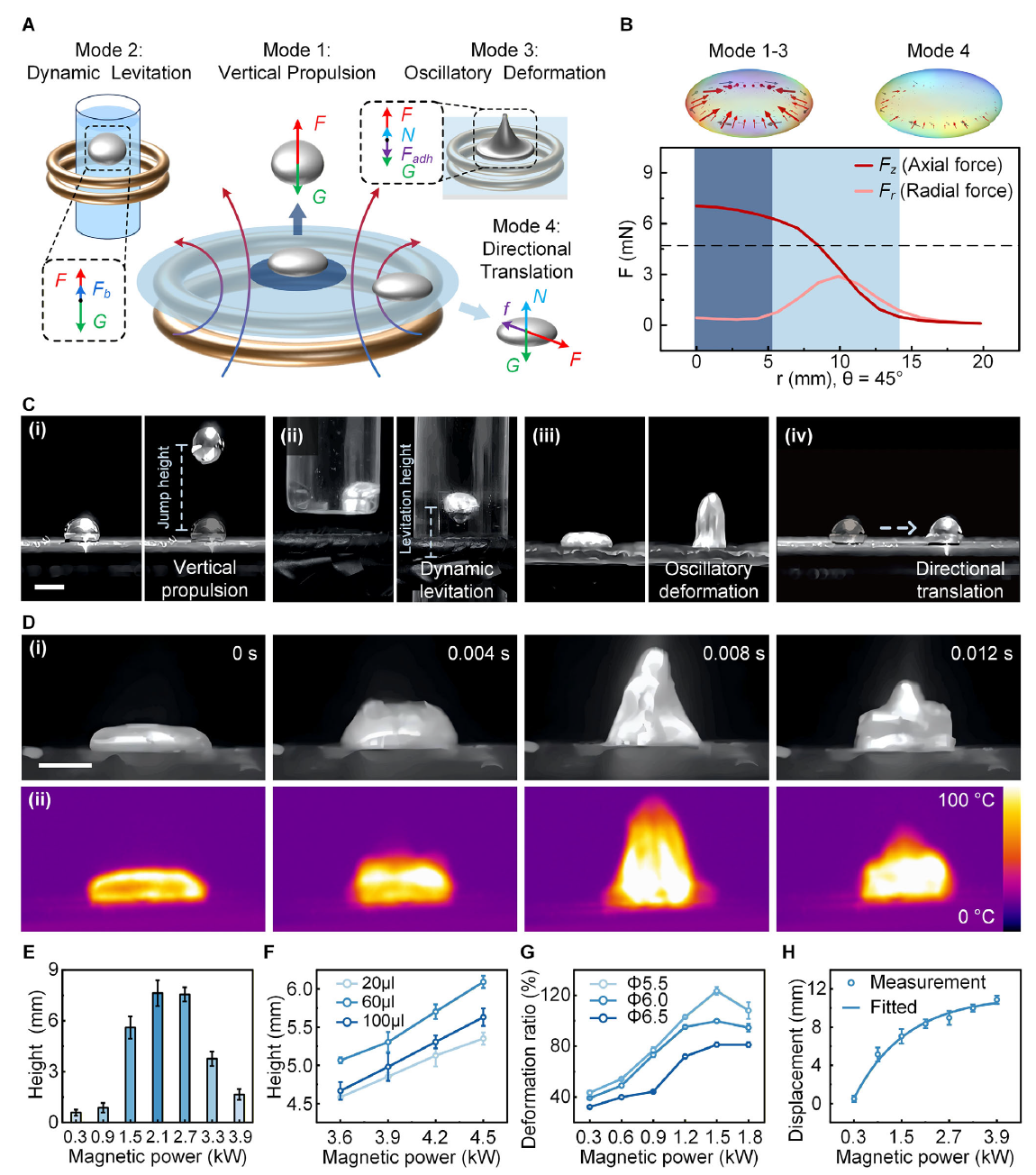
图4:液态机器人在高频磁场下的运动与形变行为。持续高频磁场使机器人保持液态,洛伦兹力与重力、浮力、表面张力、黏滞阻力和界面黏附共同决定其运动模式。机器人位于线圈中心附近时,可表现为垂直推进、液体环境中的动态悬浮或受界面约束下的振荡形变;偏离线圈中心时,则更容易发生定向平移。图中还展示了磁场功率、机器人体积和界面黏附尺寸对跳跃高度、悬浮高度、形变幅度和水平位移的影响。

图5:液态金属相变机器人的可逆相变与复杂环境导航。BiInSn 机器人在高频磁场加热下可快速熔化,并通过自然冷却重新固化;DSC 测试显示其熔点约为 62 ℃,凝固点约为 58 ℃。相变前后,机器人刚度跨越约六个数量级,使其既能以固态跨越障碍,又能以液态通过狭窄孔道。作者进一步展示了机器人在平面迷宫、水环境和空间管道中的连续导航,体现了固态运动能力与液态变形能力的结合。
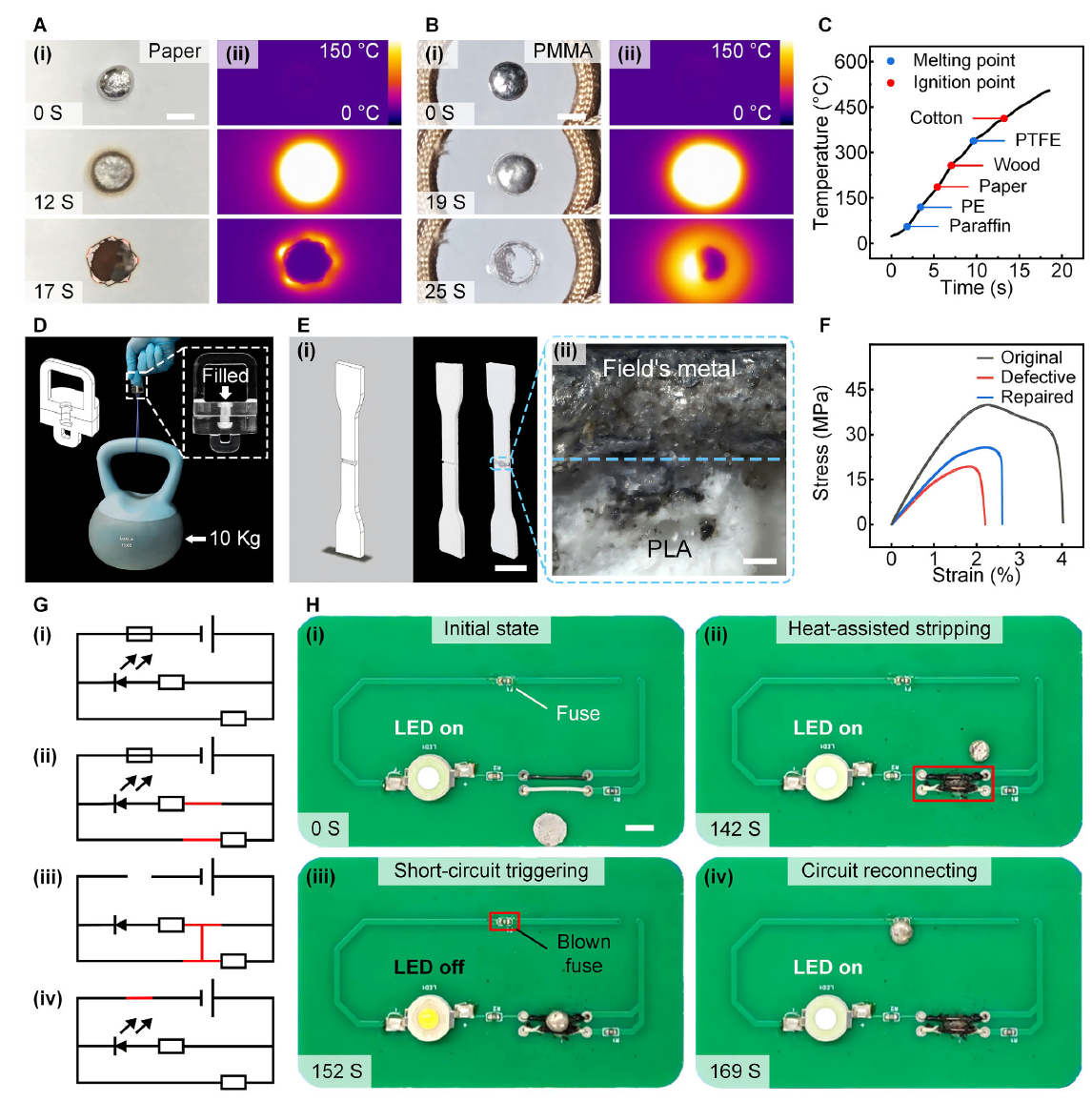
图6:基于涡流加热和固液相变的材料及电路损伤与修复。机器人在高频磁场下可作为无线移动热源,使纸张发生局部碳化穿孔,或使 PMMA 板发生热熔穿孔。利用液态金属的流动性和冷却后的固化能力,机器人还可填充结构空腔形成金属铆接,并用于修复带缺陷的 PLA 拉伸试样。在电路演示中,机器人可通过局部加热辅助剥离导线绝缘层、触发短路熔断,也可重新连接熔断位置,使 LED 恢复点亮。
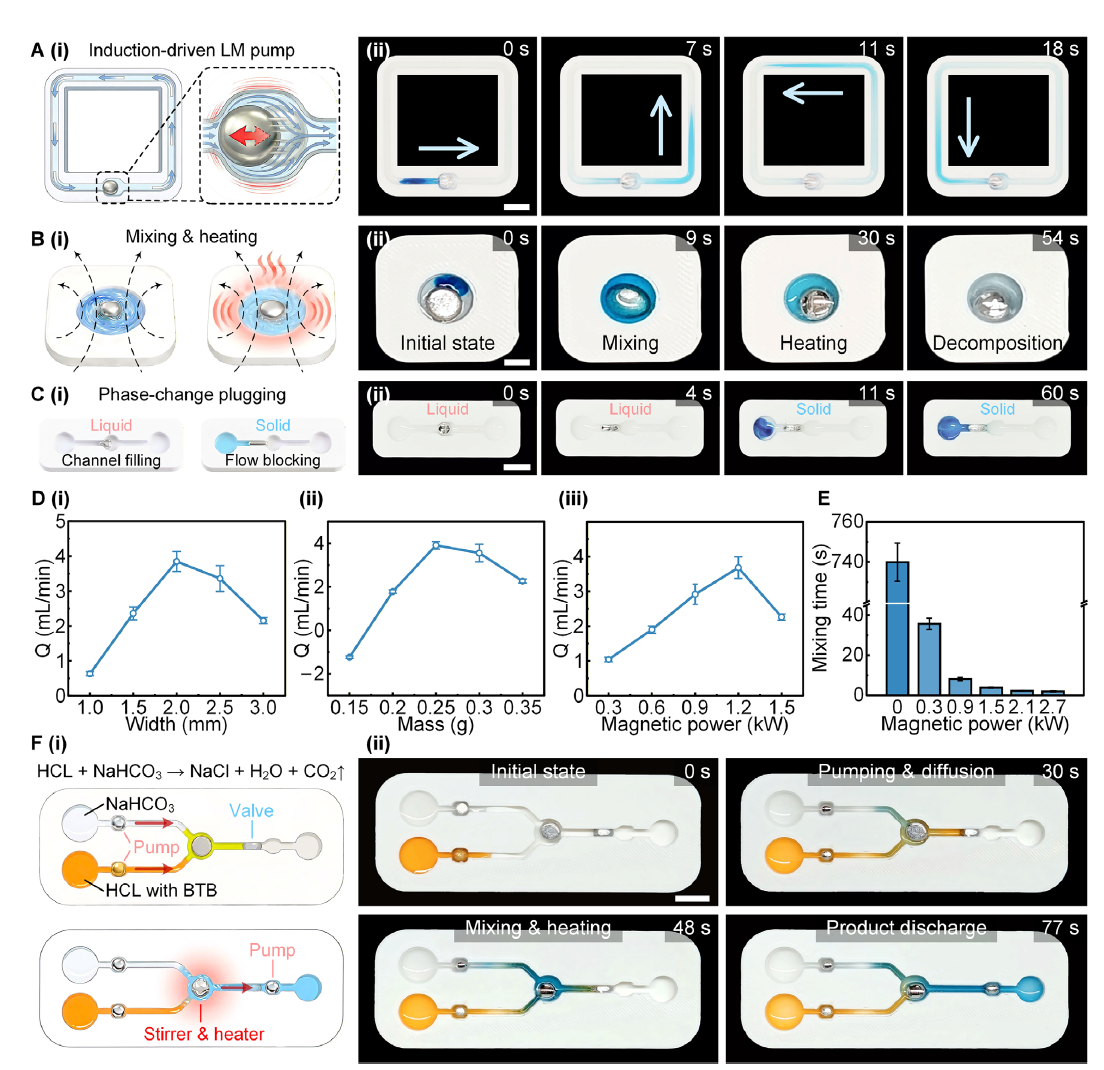
图7:液态金属相变机器人在微流控操控和片上反应中的应用演示。液态机器人在高频磁场下产生振荡位移和形变,可将高频振动转化为单向流体输运,实现无线微泵功能;同时,其振荡和涡流加热可促进混合与反应。机器人还可通过固液相变进入通道并固化,形成可切换的相变阀。作者进一步将微泵、混合/加热和相变阀整合到片上系统中,实现酸碱溶液输送、中和反应和产物排出。
参考文献
Xiaonan Sun, Ke Zhao, Juying Cai, Yuanxi Zhang, Qingyuan Wang, Zhouming Liu, Bin Liu, Shuo Wu, Yingying Zhou, Jiyu Li, Lelun Jiang. Pure Liquid Metal Phase-Transition Robot With Multimodal Motion Actuated by a High-Frequency Magnetic Field. Advanced Functional Materials, 2026.
https://doi.org/10.1002/adfm.76456
转自:https://mp.weixin.qq.com/s/Ww_ih3wwRYDpO9AzHJbxdA
