
深圳大学李辉\深圳北理莫斯科大学曾润浩\中山大学蒋乐伦联合发表《npj Flexible Electronics》:驱感一体仿生磁驱软体机器人
软体机器人技术近年来快速发展,因其出色的柔顺性和环境适应性,在医疗微创手术、工业管道检测等狭窄空间作业中展现出独特优势。然而,现有软体机器人普遍面临两大技术瓶颈:一是传统驱动方式存在响应速度慢、系统复杂等问题;二是受限于体积和材料特性,难以集成高灵敏度的环境感知功能,严重制约了其在复杂环境中的自主作业能力。针对这些挑战,国际学术界探索磁场驱动等新型驱动方式,以及仿生结构与智能感知的融合设计。其中,模仿自然界生物(如尺蠖、毛虫等)运动方式的软体机器人因其移动方式与性能备受关注。但如何在小尺度(毫米级)实现运动与感知的一体化集成,同时保证制造精度和可靠性,仍是亟待解决的关键科学问题。
在此背景下,深圳大学李辉副教授联合深圳北理莫斯科大学曾润浩副教授、中山大学蒋乐伦教授、宁波大学金育安教授等团队,通过创新性地结合仿生学设计、磁驱动力学和摩擦电传感,成功开发出具有自主感知能力的驱感一体仿生磁驱软体机器人。该研究突破了传统软体机器人在运动效率和环境感知方面的限制,通过创新的微喷打印与磁场诱导协同制造工艺(CJM),实现了微米级精密微锥结构的快速成型,为下一代智能软体机器人的发展提供了全新的技术路线。相关工作以“Magnetic soft millirobot with simultaneous locomotion and sensing capability”为题发表在《npj Flexible Electronics》。
研究内容
1.仿生设计与多功能集成突破
研究通过深度解构尺蠖生物运动机制,创新性地提出"磁性驱动-摩擦电传感"协同设计架构。在结构设计上,采用仿生多足微锥矩阵作为核心功能单元,通过精确调控微锥参数,实现了双重功能突破:一方面作为运动支撑结构,将负载能力提升至自重5.2倍;另一方面作为摩擦电增强单元,使输出电压达到7.92V。这种"一材双效"的设计理念,成功解决了毫米级机器人空间受限条件下的功能集成难题(图1)。
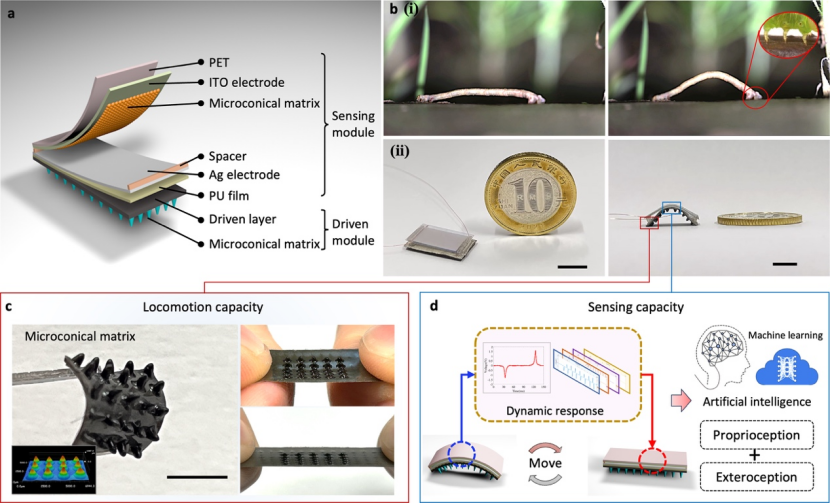
图1:(a) 机器人结构示意图;(b) 尺蠖与机器人的运动行为对比。
2.创新制造工艺:微喷打印与磁场诱导协同制造工艺
研究突破了软体机器人精密制造的瓶颈,开发的协同喷射打印与磁感应(CJM)技术融合了高精度喷射打印与动态磁场成型两大核心工艺,将传统需要数小时的模板法制造过程缩短至数分钟之内,且无需复杂模具,制造成本降低80%,实现了微锥结构的高度可控生长,为多功能软体机器人的快速原型开发提供了标准化制造平台(图2)。
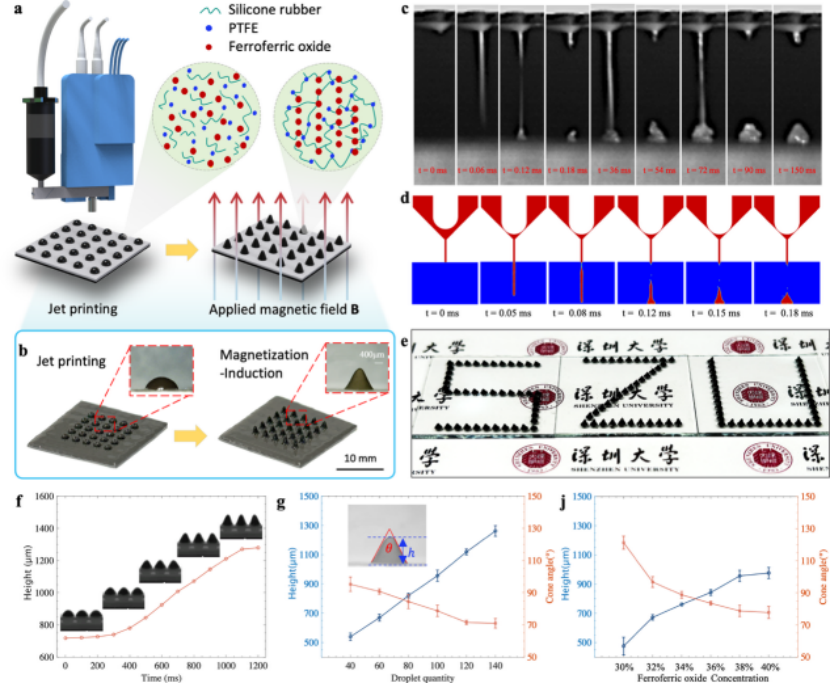
图2:CJM制造工艺及微锥矩阵的形态特征。
3.机器人双重功能:同时运动与感知
研究构建了基于机器学习的智能感知系统,创新性地将微锥矩阵的接触力学特性转化为高灵敏度电信号,开发具有多尺度特征提取能力的时序感知网络(TPN),建立动态窗口采样机制实现实时地形分类。在5类典型地形测试中,系统识别准确率达96.7%,响应延迟<50ms,且经过12000次循环测试后性能衰减<5%,满足了移动机器人对感知系统实时性、稳定性要求(图3)。
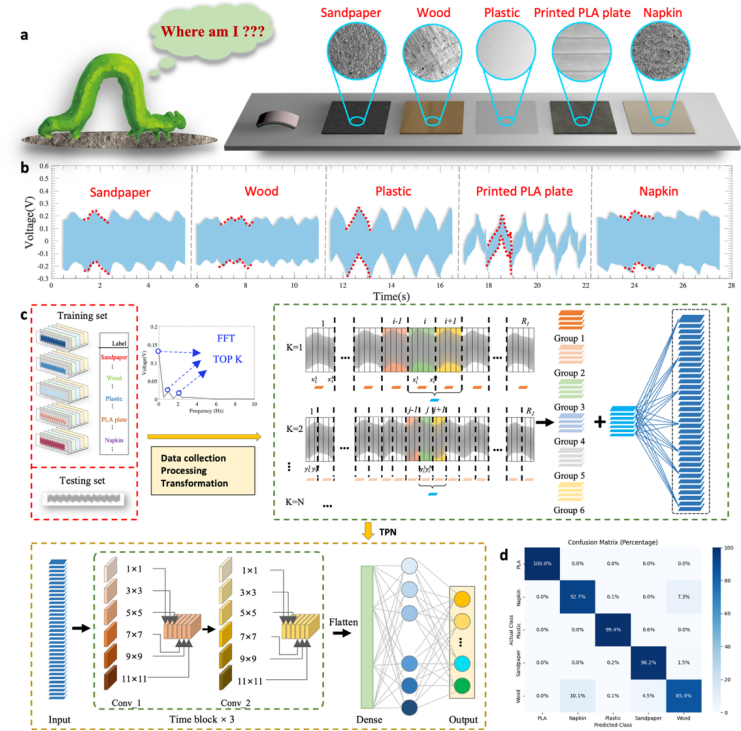
图3:(a) 机器人在不同地形上的运动;(b) 地形识别信号输出;(d) 机器学习分类结果。
研究结论
本研究创新性地提出了一种集运动与感知功能于一体的磁驱软体毫米机器人系统,通过仿生多足微锥矩阵设计和摩擦电-磁驱协同作用机制,成功解决了传统软体机器人在小型化、功能集成和环境适应性等方面的关键技术瓶颈,为下一代智能软体机器人在工业检测、医疗微创等领域的应用提供了创新性的技术方案。该论文获得国家自然科学基金、广东省自然科学基金、深圳市科技计划项目等科技项目支持。
论文标题:Magnetic soft millirobot with simultaneous locomotion and sensing capability
期刊:npj Flexible Electronics
DOI:10.1038/s41528-025-00437-0
转自:https://mp.weixin.qq.com/s/gIBcLQdX88uKyZjutNHMlg
