

【Nano Energy】中山大学蒋乐伦教授团队:具有摩擦纳米自发电特性的仿生蛞蝓磁控软体微型机器人(TENG-Robot)
自然生物进化出许多特殊的结构和技能以适应环境,这为科学家和工程师开发更强大的机器人提供了非凡的灵感来源,仿生机器人的概念应运而生。仿生软体机器人因其自由度极高的特性而展现出优异的环境适应和人机交互能力,引起了研究学者的广泛关注。现有的研究大多从材料和驱动两个方向对仿生软体机器人不断推陈出新,已发展出了包括磁、电、光、热、液压、气压、化学等多种有效的驱动方式,其中磁场驱动兼具快速响应和远程控制的优势,在复杂的封闭环境中的应用潜力尤为突出。然而,为了使仿生软体机器人成为一个更接近动物的具有高度功能化的系统,更有效的功能如自我感知和能量供应等,应该被集成到软体机器人中协同增效。在自供能技术中摩擦纳米发电机具有显著优势,其发电效率高且广泛采用柔性材料制备,易于集成在软体机器人上而避免刚度失配,有望实现仿生软体机器人的功能化。
本研究中,作者从结构和功能的角度设计了一种受蛞蝓运动模式启发的磁控仿生软体机器人(TENG-Robot),它与摩擦纳米发电机完全集成,可用于板载传感和自供电充电。蛞蝓可以在几乎所有陆地表面稳定的爬行,这种强大的环境适应能力引起了作者的兴趣,通过观察和分析蛞蝓独特的运动机理成功设计了一种软体机器人的创新结构。在旋转磁场的作用下,可编程磁化后的柔性磁片产生类似蛞蝓腹足的行波状几何结构而稳定运动,同时驱动集成在磁片上的摩擦纳米发电机以接触分离的模式产生摩擦电。TENG-Robot是无线驱动的,完全柔软且高度集成,展现出前所未有的适应性、敏捷性和多功能性。此外,作者在结构仿生的基础上进一步实现了功能仿生,以多种动物的神奇能力作为模板开发出功能化软体机器人。总之,TENG-Robot不仅提出了一种磁场无线驱动的创新仿生结构,而且拓展了仿生软体机器人的多功能应用潜力,也为理解动物行为背后的原理奠定了重要基础。
研究成果近日以“Slug-inspired Magnetic Soft Millirobot Fully Integrated with Triboelectric Nanogenerator for On‐board Sensing and Self‐powered Charging”为题发表在“Nano Energy”上。论文的第一作者为中山大学生物医学工程学院博士研究生彭乐伦,中山大学生物医学工程学院蒋乐伦教授和广东工业大学陈云教授为本文的共同通讯作者,本研究工作还得到了佐治亚理工学院汪正平院士的指导。
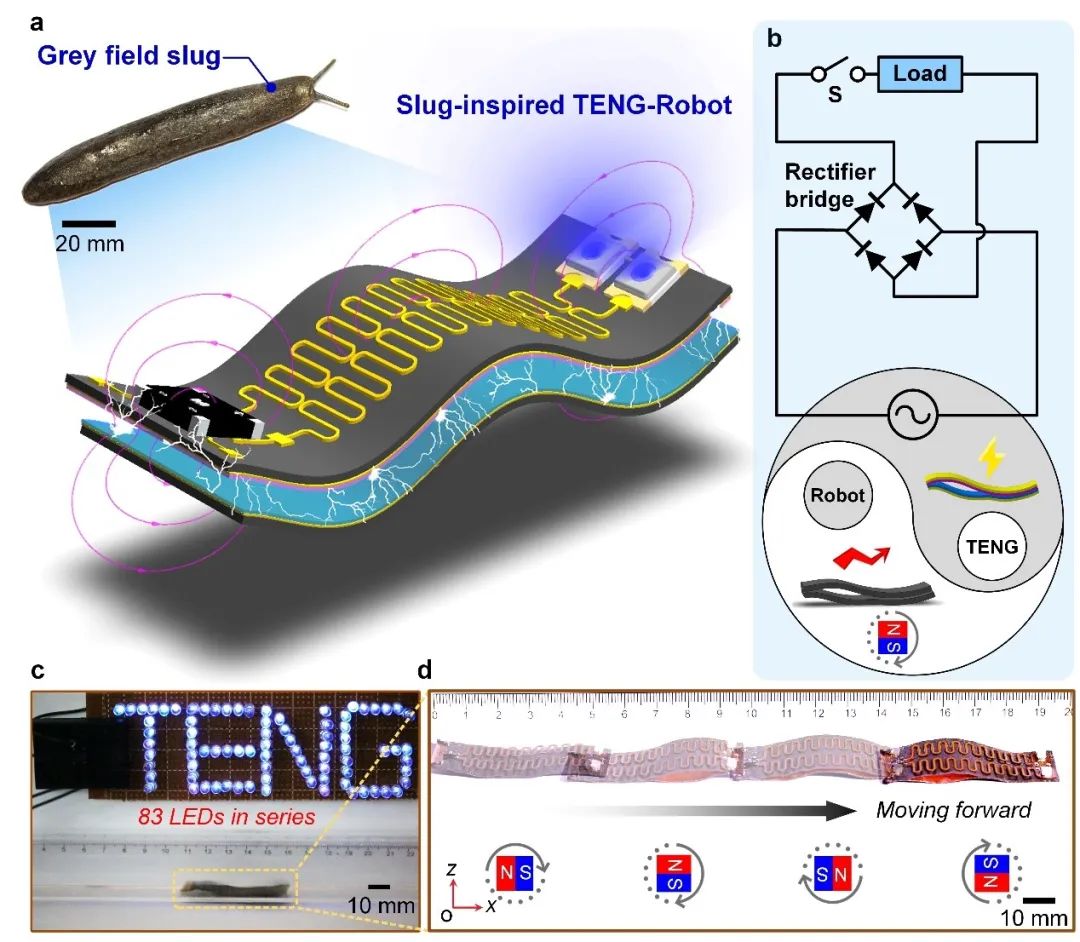
图1:受蛞蝓启发的TENG-Robot的概念图。(a) 受蛞蝓启发的 TENG-Robot示意图。(b) TENG-Robot的电路原理图。(c) 展示了TENG-Robot的运动性能和摩擦发电能力--可同时点亮83盏LED。(d) TENG-Robot在旋转磁场驱动下的运动行为。
在这项工作中,作者提出了一种受蛞蝓启发的TENG-Robot,其在一个柔性薄片结构中完全集成了磁性软机器人和摩擦纳米发电机。在旋转磁场的驱动下,TENG-Robot可以在各种地形(如平面、斜坡、间隙、弯道、隧道)上以蛞蝓状的步态爬行、攀爬和转向,并在此过程中依靠局部的接触分离同步产生摩擦电能量。TENG-Robot实现了不受束缚的运动,表现出优异的运动性能,它可以以每秒5个身长的速度爬行,以120°/s的旋转速度并能够爬上最大约60°斜率的斜坡。与此同时,TENG-Robot具有良好的摩擦发电性能,可产生120V的峰峰值电压和 10μA的峰峰值电流。并且在多种动物的功能性启发下,开发出可自持续发光,可自供能充电,可自供能传感的TENG-Robot,为理解动物行为背后的原理奠定了重要基础。
原文链接:
https://www.sciencedirect.com/science/article/pii/S2211285522004451
被报道在公众号文章https://mp.weixin.qq.com/s/lnS5Izv5a1S_QbZ9dUgN8w
