
姓名:宋嵘
职称:教授/博士生导师
电子邮箱:songrong@mail.sysu.edu.cn
一、主要经历
2015.07-现在:中山大学,教授
2009.09-2015.06:中山大学,副教授
2007.06-2009.06:飞利浦亚洲研究院,研究员(Research scientist)
2006.03-2007.06:香港理工大学康复科技及资讯学系,研究助理(Research associate)
2002.07-2006.03:香港理工大学生物医学工程专业,博士
二、研究方向
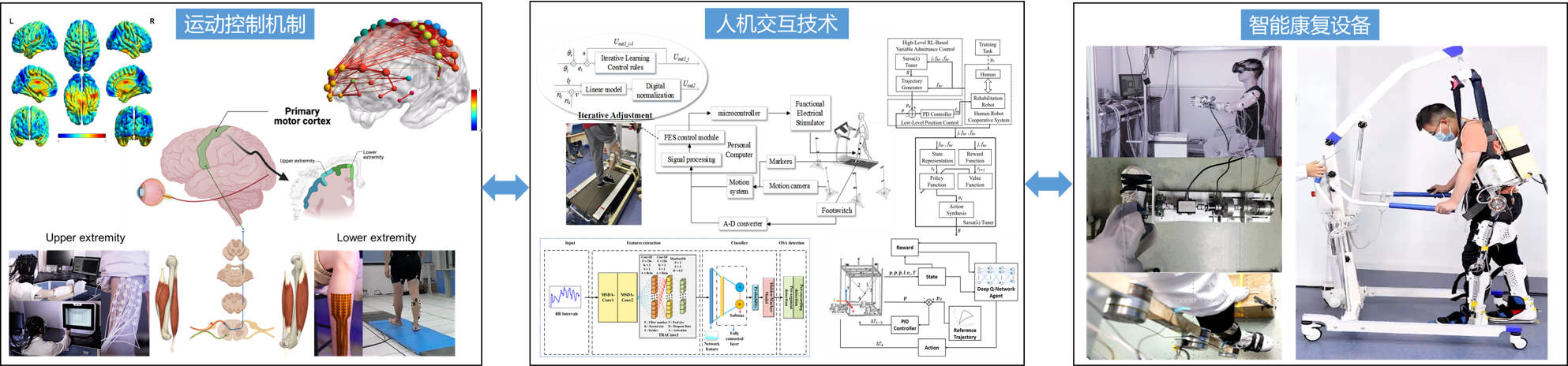
1. 运动控制机制:通过近红外(fNIRS)、脑电(EEG)、功能磁共振成像(fMRI)、(高密度)表面肌电、运动学和动力学等信号研究运动控制的生理和病理机制;
2. 人机交互技术:生物医学信号处理与分析方法、人体运动意图识别技术、基于强化学习的机器人控制方法等;
3. 智能康复设备:绳牵引康复机器人、踝关节康复机器人、可穿戴下肢康复机器人、功能性电刺激器、虚拟现实技术等;
三、科研项目
先后主持包括科技部重点研发计划战略性科技创新合作项目、国家自然科学基金面上、广东省科技计划重大重点项目、深圳市基础研究和国际合作项目等多项国家和省部级项目。
四、论著和发明
近三年代表性论文:
- Na Tian, Hairong Yu, ShaoFeng Zhao, Guanzheng Liu, and Rong Song*. “Modified multiscale transfer entropy analysis of intra- and inter-couplings of cardio-respiratory systems during meditation” Biomedical Signal Processing and Control, January 2023.
- Renyu Yang, ZhijunLi, YuelingLyu, and Rong Song*. “Fast finite-time tracking control for a 3-DOF cable-driven parallel robot by adding a power integrator,” Mechatronics, vol. 84, Jun, 2022.
- Na Tian, Liuke Liang, Xuemao Luo, Rongliang Hu, Wansheng Long, and Rong Song*. “More than just statics: altered complexity of dynamic amplitude of low-frequency fluctuations in the resting brain after stroke,” Journal of neural engineering, vol. 19, no. 3, Jun, 2022.
- Chenglin Xie, Qianqian Yang, Yao Huang, Steven Su, Ting Xu, and Rong Song*. “A Hybrid Arm-Hand Rehabilitation Robot With EMG-Based Admittance Controller,” IEEE Transactions on Biomedical Circuits and Systems, vol. 15, no. 6, pp. 1332-1342, Dec, 2021.
- Jie Zhou, Zhijun Li, Xianming Li; Xiaoyun Wang, and Rong Song*. “Human–Robot Cooperation Control Based on Trajectory Deformation Algorithm for a Lower Limb Rehabilitation Robot,” IEEE/ASME Transactions on Mechatronics, vol. 26, no. 6, pp. 3128-3138, Dec, 2021.
- Kaifan Xie, Yueling Lyu, Xianyi Zhang, and Rong Song*. “How Compliance of Surfaces Affects Ankle Moment and Stiffness Regulation During Walking,” Frontiers in Bioengineering and Biotechnology, vol. 9, Oct, 2021.
- Y. Zhuang, Y. Leng, J. Zhou, R. Song*, L. Li, and S. W. Su, "Voluntary Control of an Ankle Joint Exoskeleton by Able-Bodied Individuals and Stroke Survivors Using EMG-Based Admittance Control Scheme," IEEE Transactions on Biomedical Engineering, vol. 68, no. 2, pp. 695-705, Feb 2021
- H. Yu, W. Xu, Y. Zhuang, K. Tong, and R. Song*, "Wavelet coherence analysis of muscle coupling during reaching movement in stroke," Computers in Biology and Medicine, vol. 131, Apr 2021, Art. no. 104263.
- N. Tian, Y. Chen, W. Sun, H. Liu, X. Wang, T. Yan, and R. Song*. "Investigating the Stroke- and Aging-Related Changes in Global and Instantaneous Intermuscular Coupling Using Cross-Fuzzy Entropy," IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 29, pp. 1573-1582, 2021.
- X. Li, Q. Yang, and R. Song*, "Performance-Based Hybrid Control of a Cable-Driven Upper-Limb Rehabilitation Robot," IEEE Transactions on Biomedical Engineering, vol. 68, no. 4, pp. 1351-1359, Apr 2021.
- C. Jian, H. Liu, L. Deng, X. Wang, T. Yan, and R. Song*, "Stroke-induced alteration in multi-layer information transmission of cortico-motor system during elbow isometric contraction modulated by myoelectric-controlled interfaces," Journal of Neural Engineering, vol. 18, no. 4, Aug 2021, Art. no. 0460e1.
- C. Jian, L. Deng, H. Liu, T. Yan, X. Wang, and R. Song*, "Modulating and restoring inter-muscular coordination in stroke patients using two-dimensional myoelectric computer interface: a cross-sectional and longitudinal study," Journal of Neural Engineering, vol. 18, no. 3, Jun 2021, Art. no. 036005.
- L. Liang, R. Hu, X. Luo, B. Feng, W. Long, and R. Song*, "Reduced Complexity in Stroke with Motor Deficits: A Resting-State fMRI Study," Neuroscience, vol. 434, pp. 35-43, May 10 2020.
- Y. Li, C. Jiang, M. Zheng, X. Wang, and R. Song*, "Modeling Ankle Torque and Stiffness Induced by Functional Electrical Stimulation," IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 28, no. 12, pp. 3013-3021, Dec 2020.
- C. Jiang, M. Zheng, Y. Li, X. Wang, L. Li, and R. Song*, "Iterative Adjustment of Stimulation Timing and Intensity During FES-Assisted Treadmill Walking for Patients After Stroke," IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 28, no. 6, pp. 1292-1298, Jun 2020.
第一发明人授权专利
- 宋嵘,申志航,一种基于表现的自适应康复机器人控制方法. 申请号:CN201910101510.0,申请日期:2019-2-1.(已授权)
- 宋嵘,赵黎明,可穿戴式手部康复机器人. 申请号:CN201910041505.5,申请日期:2019-1-17.(已授权)
- 宋嵘,杨倩倩,牛杰,基于导纳控制的绳牵引上肢康复机器人的训练方法及系统. 申请号:CN201710832598.4,申请日期:2017-9-15.(已授权)
- 宋嵘,叶瑀,孙文博,马乐,一种抓握功能评估与训练系统. 专利号:ZL201410318798.4, 申请日: 2014-7-3(已授权)
- 宋嵘,杨锦,敖迪,基于肌电反馈的上肢训练方法和系统.专利号:ZL201310669597.4, 申请日: 2013-12-12(已授权)
- 宋嵘,杨东静,杨锦,肖潭,袁培江,一种上肢康复机器人. 申请号:CN201310222580.4,申请日期:2013-6-6.(已授权)
- 宋嵘,马乐,孙睿,一种辅助步态训练的方法及系统. 申请号:CN201310176050.0,申请日期:2013-5-13.(已授权)
- 宋嵘,李宇宁,一种肢体康复训练的难度调节方法. 申请号:CN201310034833.5,申请日期:2013-1-29.(已授权)
- 宋嵘,周伟,汤启宇,燕铁斌,孙睿,一种绳牵引上肢康复机器人及其控制方法. 申请号:CN201210052562.1,申请日期:2012-3-1.(已授权)
- 宋嵘,许跃,蒋庆,张志光,李乐,辅助口颌系统进行康复训练的系统和运动参数记录方法. 专利号: ZL 201110323831.9, 申请日: 2011-10-24. (已授权)
- 宋嵘,蒋庆,一种便携式膀胱尿量检测方法及装置. 专利号: ZL201010213757, 授权日: 2011-01-12.(已授权并转让)
- 宋嵘,丁超,彭扬,张源,用于支持用户进行练习的系统. 申请号:CN201080043887.2,申请日期:2010-9-26.(已授权)
- 宋嵘,J·王,Y·刘,H·张,利用色度键控的姿势识别. 申请号:CN201080028299.1,申请日期:2010-6-23.(已授权)
五、荣誉获奖情况
2016年第六届吴文俊人工智能科学技术进步奖一等奖(排名第四)
2014年广东省科学技术奖(应用技术-社会公益)一等奖(排名第八)
2013第二届国际康复工程会议最佳学生论文提名奖(指导老师)
2014全国生物医学电子创新设计竞赛三等奖2项(指导老师)
挑战杯全国大学生课外学术科技作品竞赛广东省赛区一等奖1项(2013)、二等奖1项(2013)、三等奖1项(2015)(指导老师)
六、主要兼职
广东省传感技术与生物医疗仪器重点实验室主任
七、社会服务
中国生物医学工程学会康复工程分会委员
中国康复医学会康复工程与产业促进专业委员会委员
中国自动化学会机器人智能专委会委员
中国康复辅助器具协会康复工程专业委员会委员
广东省生物医学工程学会康复工程分会、智慧医疗分会、医疗机器人与人工智能分会副主任委员
约20余种国际/国内学术期刊审稿人
八、团队招聘
中山大学运动控制与康复工程实验室,现面向国内外公开招聘特聘(副)研究员、博士后等专职科研人员,以及博士、硕士研究生若干人,竭诚欢迎优秀人才前来应聘。如有意向随时发邮件咨询和交流:songrong@mail.sysu.edu.cn。
研究方向和专业背景要求:医学信号处理、康复工程、机器人、生物力学、可穿戴医疗设备、虚拟现实、机械电子等相关领域。
九、联系方式
电子邮件:songrong@mail.sysu.edu.cn
团队网站:https://bme.sysu.edu.cn/srelab/