宋嵘

姓名:宋嵘
职称:教授/博士生导师
电子邮箱:songrong@mail.sysu.edu.cn
一、主要经历
2015.07-现在:中山大学,教授
2009.09-2015.06:中山大学,副教授
2007.06-2009.06:飞利浦亚洲研究院,研究员(Research scientist)
2006.03-2007.06:香港理工大学康复科技及资讯学系,研究助理(Research associate)
2002.07-2006.03:香港理工大学生物医学工程专业,博士
二、研究方向
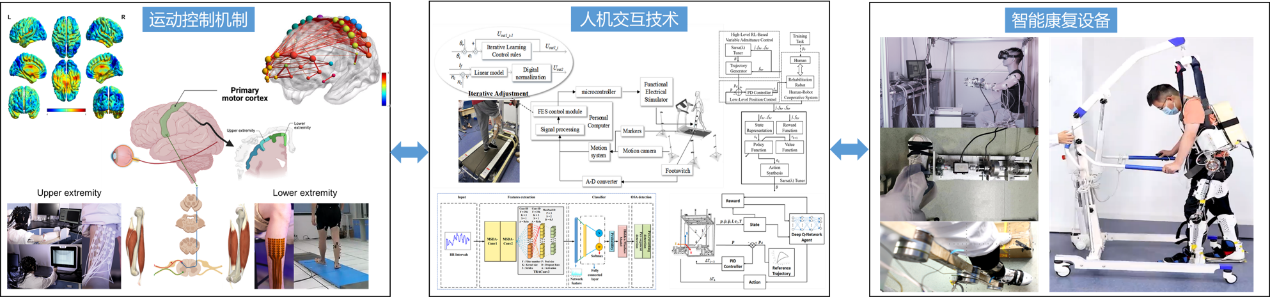
1. 运动控制机制:通过近红外(fNIRS)、脑电(EEG)、功能磁共振成像(fMRI)、(高密度)表面肌电、运动学和动力学等信号研究运动控制的生理和病理机制;
2. 人机交互技术:生物医学信号分析方法、机器人智能控制方法、强化学习在机器人控制中的应用等;
3. 智能康复设备:绳牵引康复机器人、踝关节康复机器人、可穿戴下肢康复机器人、功能性电刺激器、虚拟现实技术等。
三、科研项目
先后主持包括科技部重点研发计划战略性科技创新合作项目、国家自然科学基金面上、广东省科技计划重大重点项目、深圳市基础研究和国际合作项目等多项国家和省部级项目。
四、论著和发明
近五年部分代表性论文如下(*为通讯作者):
1.Chenglin Xie, Yueling Lyu, Guoxin Li, Raymond Kai-Yu Tong, Haisheng Xia, Rong Song*, and Zhijun Li. "A Cable-Driven Upper Limb Rehabilitation Robot With Muscle-Synergy-Based Myoelectric Controller." IEEE Transactions on Robotics, vol. 40, 2024, pp. 3199-3210.(TRO,中科院计算机科学1区)
2.Chenglin Xie, Zhijun Li, and Rong Song*. “Deep-LSTM-Based Human-Robot Collaboration Control With Static-Dynamic Calibration.”IEEE Transactions on Industrial Electronics, vol. 71, no. 12, Dec. 2024, pp. 16165-16174.(TIE,中科院工程技术1区)
3.Yang, Qinlian, Yingqi Li, You Li, Manxu Zheng, and Rong Song*. “An Adaptive Hammerstein Model for FES-Induced Torque Prediction Based on Variable Forgetting Factor Recursive Least Squares Algorithm.” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 32, 2024, pp. 1109-1118.(SCI Q1)
4.Jie Zhou, Huanfeng Peng, Manxu Zheng, Zhe Wei, Tao Fan, and Rong Song*. "Trajectory Deformation-Based Multi-Modal Adaptive Compliance Control for a Wearable Lower Limb Rehabilitation Robot." IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 32, 2024, pp. 314-325. (SCI Q1)
5.Yifan Li, Yueling Lyu, and Rong Song*. “Phase-Dependent Modulation of Muscle Activity and Intermuscular Coupling During Walking in Patients After Stroke.” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 31, 2023, pp. 1119-1130. (SCI Q1)
6.Na Tian, Hairong Yu, Shaofeng Zhao, Guangzheng Liu, and Rong Song*. "Modified multiscale transfer entropy analysis of intra- and inter-couplings of cardio-respiratory systems during meditation." Biomedical Signal Processing and Control, vol. 79, 2023, article 103983. (SCI Q1)
7.Yiqun Dong, Kangling Wang, Ruxin He, Kai Zheng, Xiaohong Wang, Guozhi Huang*, and Rong Song*. "Hybrid and adaptive control of functional electrical stimulation to correct hemiplegic gait for patients after stroke." Frontiers in Bioengineering and Biotechnology, vol. 11, 2023, article 1246014. (SCI Q1)
8.Na Tian, Ying Chen, Wenbo Sun, Huihua Liu, Xiaoyun Wang, Tiebin Yan, and Rong Song*. “Investigating the Stroke- and Aging-Related Changes in Global and Instantaneous Intermuscular Coupling Using Cross-Fuzzy Entropy.” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 29, 2021, pp. 1573-1584. (SCI Q1)
9.Jie Zhou, Zhijun Li, Xianming Li, Xiaoyun Wang, and Rong Song*. “Human–Robot Cooperation Control Based on Trajectory Deformation Algorithm for a Lower Limb Rehabilitation Robot.” IEEE/ASME Transactions on Mechatronics, vol. 26, no. 6, Dec. 2021, pp. 3128-3139. (中科院工程技术1区)
10.Yao Huang, Rong Song, Ahmadreza Argha, Branko G. Celler, Andrey V. Savkin, and Steven W. Su*. “Human Motion Intent Description Based on Bumpless Switching Mechanism for Rehabilitation Robot.” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 29, 2021, pp. 673-684. (SCI Q1)
11.Yingqi Li, Chao Jiang, Manxu Zheng, Xiaoyun Wang, and Rong Song*. “Modeling Ankle Torque and Stiffness Induced by Functional Electrical Stimulation.”IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 28, no. 12, Dec. 2020, pp. 3013-3024. (SCI Q1)
12.Yu Zhuang, Yan Leng, Jie Zhou, Rong Song*, Le Li, and Steven W. Su. “Voluntary Control of an Ankle Joint Exoskeleton by Able-Bodied Individuals and Stroke Survivors Using EMG-Based Admittance Control Scheme.” IEEE Transactions on Biomedical Engineering, vol. 68, no. 2, Feb. 2021, pp. 695-706. (SCI Q2)
13.Kaifan Xie, Yueling Lyu, Xianyi Zhang*, and Rong Song*. "How Compliance of Surfaces Affects Ankle Moment and Stiffness Regulation During Walking." Frontiers in Bioengineering and Biotechnology, vol. 9, 2021, article 726051. (SCI Q1)
14.Yao Huang, Rong Song, Ahmadreza Argha, Branko G. Celler, Andrey V. Savkin, and Steven W. Su*. “Continuous Description of Human 3D Motion Intent Through Switching Mechanism.” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 28, no. 1, Jan. 2020, pp. 277-284. (SCI Q1)
15.Chao Jiang, Manxu Zheng, Yingqi Li, Xiaoyun Wang, Le Li, and Rong Song*. “Iterative Adjustment of Stimulation Timing and Intensity During FES-Assisted Treadmill Walking for Patients After Stroke.”IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 28, no. 6, June 2020, pp. 1292-1303. (SCI Q1)
近几年第一发明人授权专利:
1.宋嵘;王晓露,一种基于虚拟现实技术的康复训练方法与装置,申请号:CN202311493186.4,申请日期:2023-11-09
2.宋嵘;李一帆,一种康复训练任务难度的自适应调节方法与系统,申请号:CN202311355941.2,申请日期:2023-10-18
3.宋嵘;翁培煜,一种自适应调节裂带双轨跑步机履带速度系统,申请号:CN202311297671.4,申请日期:2023-10-09
4.宋嵘;翁培煜,一种康复训练任务难度自适应调节方法及装置,申请号:CN202311297120.8,申请日期:2023-10-08
5.宋嵘;杨仁宇,康复机器人的控制装置、控制方法及绳牵引康复机器人,申请号:CN202310840264.7,申请日期:2023-07-10
6.宋嵘;林裕达;吕月玲,一种下肢康复机器人的控制方法、装置及机器人,申请号:CN202210518420.3,申请日期:2022-05-12
7.宋嵘;林裕达;吕月玲,一种多线圈磁流变液阻尼器,申请号:CN202210518419.0,申请日期:2022-05-12
8.宋嵘;田娜;刘官正,基于心率变异性交互性调节呼吸反馈的方法、装置及设备,申请号:CN202210079132.2,申请日期:2022-01-24
9.吕月玲;宋嵘,基于磁流变液的可变刚度和阻尼传动装置及其设计方法,申请号:CN202110466955.6,申请日期:2021-04-28
10.杨倩倩;汤荣荣;宋嵘,一种结合轨迹规划的康复机器人变阻抗控制方法,申请号:CN202010888789.4,申请日期:2020-08-28
11.宋嵘;姜超;陈广涛,一种自适应电刺激训练系统,申请号:CN201910856978.0,申请日期:2019-09-11
12.宋嵘;赵黎明;谢铖林,一种复合控制系统的可穿戴式手部康复装置,申请号:CN201910371284.8,申请日期:2019-05-06
13.宋嵘;申志航,一种基于表现的自适应康复机器人控制方法,申请号:CN201910101510.0,申请日期:2019-02-01
14.宋嵘;申志航,一种基于鲁棒控制与导纳控制结合的下肢康复机器人的控制方法,申请号:CN201910100957.6,申请日期:2019-02-01
15.罗洁;罗海珍;宋嵘,一种基于跑步机力台的下肢运动能力定量评价方法和系统,申请号:CN201811515120.X,申请日期:2018-12-12
五、荣誉获奖情况
2016年第六届吴文俊人工智能科学技术进步奖一等奖(排名第四)
2014年广东省科学技术奖(应用技术-社会公益)一等奖(排名第八)
2013第二届国际康复工程会议最佳学生论文提名奖(指导老师)
2014全国生物医学电子创新设计竞赛三等奖2项(指导老师)
挑战杯全国大学生课外学术科技作品竞赛广东省赛区一等奖1项(2013)、二等奖1项(2013)、三等奖1项(2015)(指导老师)
六、主要兼职
广东省传感技术与生物医疗仪器重点实验室主任
七、社会服务
中国生物医学工程学会康复工程分会委员
中国康复医学会康复工程与产业促进专业委员会委员
中国自动化学会机器人智能专委会委员
中国康复辅助器具协会康复工程专业委员会委员
广东省生物医学工程学会康复工程分会、智慧医疗分会、医疗机器人与人工智能分会副主任委员
约20余种国际/国内学术期刊审稿人
八、团队招聘
中山大学运动控制与康复工程实验室,现面向国内外公开招聘特聘(副)研究员、博士后等专职科研人员,以及博士、硕士研究生若干人,竭诚欢迎优秀人才前来应聘。如有意向随时发邮件咨询和交流:songrong@mail.sysu.edu.cn。
研究方向和专业背景要求:医学信号处理、康复工程、机器人、生物力学、可穿戴医疗设备、虚拟现实、机械电子等相关领域。
九、联系方式
电子邮件:songrong@mail.sysu.edu.cn
团队网站:https://bme.sysu.edu.cn/srelab/
